| 馬達型號 | PSM-20 series | PSM-28 series | PSM-42 series | PSM-56 series | PSM-60 series |
|---|---|---|---|---|---|
| 驅動器型號 | PSD-M-20 series | PSD-M-28 series | PSD-M-42 series | PSD-M-56 series | PSD-M-60 series |
| 輸入電壓 | 24VDC ±10% | |
|---|---|---|
| 控制方式 | ARM-based 32位MCU閉迴路控制 | |
| 功耗 | 500mA Max(不包括馬達電流和煞車電流(使用煞車時)) | |
| 環境條件 | 温度 | 使用環境溫度:0~50℃(無結露) 保存環境溫度:-20~70℃(無結露) |
| 濕度 | 工作環境濕度:35 至 85% RH(無結露) 保存環境濕度:10 至 90% RH(無結露) |
|
| 振動 | 0.5G | |
| 安規 | CE : EN61800-3:2004/A1:2012(EnvironmentⅡC3) RoHS : 2011/65/EU |
|
| 功能※2 | 轉速 | 0~3,000rpm※1 |
| 最大脈衝輸入頻率 | 500k[PPS] | |
| 解晰度(P/R) | 500, 1000, 1600, 2000, 3600, 4000, 5000, 6400, 7200, 10000(由止撥開關設定) PSM-20 系列的編碼器解晰度為 4,000 [P/R](乘以 4)。 [注意] 對於編碼器反饋輸出, PSD-S-20 為 4,000P/R(乘以 4),與上面設置的解晰度無關。 PSD-S-28 至 60 的輸出固定為 10,000 P/R(乘以 4)。 |
|
| 保護功能(警報輸出) | 過電流保護、過速度保護、位置跟隨誤差、過載、過熱、回生電壓、馬達連接、編碼器連接、 馬達電壓、整定、ROM、位置偏差過大 |
|
| LED表示 | 電源、ServoON(勵磁ON)狀態、報警、定位完成 | |
| 啟動電流※3 | 50%~150%(由參數設定) 運行電流是馬達運行(旋轉)時流過馬達的電流值。 它是根據馬達的額定電流設置的。 * 出廠時的設定值為 100%。 |
|
| 停止電流 | 20%~100%(由參數設定) 馬達停止0.1秒後,設定停止電流設定值。 靜止時的電流值是與馬達額定電流的比值。 * 出廠設置為 50% |
|
| 選配 | 馬達停止運轉時自動輸出 介面:場效電晶體輸出 |
|
| Motionnet規格 | 通過串行通信系統 Motionnet*1 進行運動控制 搭載專用LSI:Motionnet Motor control LSI:G9103C(Nippon Pulse Motor製品) |
|
|---|---|---|
| 同步 通信 Motionnet |
循環通訊時間和傳輸週期 | 通訊時間 Max 15.1us 傳輸週期 使用 32 個單元時最大 0.49 ms#1 使用 64 個單元時最大 0.97 ms #2 (傳輸速度 20Mpps,使用標準線材時#1:100m,#2:50m) |
| 數據通訊時間 | 最大 19.3us (將 4 Byte的目標位置命令寫入 G9103C 的目標位置命令設定暫存器時) |
|
| 實體距離 | 最長100m(傳輸速度20Mbps,連接32台時) 最大50m(傳輸速度20Mbps,連接64台時) 最大100m(傳送速度10Mbps,連接64台時) (使用標準線材) |
|
| 介面 | 高速RS485介面 | |
| 協議 | Motionnet協議 | |
| 串口通訊代碼 | NRZ | |
| 串口通訊方式 | 半雙工 | |
| 接線方式 | 使用網路線或專用線材 | |
| 站號設定 | 通過開關切換設置站號 0 到 63 | |
| 傳送速度 | 20Mbps / 10Mbps / 5Mbps / 2.5Mbps 通過開關切換設置 | |
| 終端電阻設定 | 實體終端模組設定 通過開關切換設置 | |
| 同步振盪器 | 80 MHz(G9103C用) | |
| 運動控制 | 插補功能 | 任意2軸圓弧插補,64軸直線插補 |
| 脈衝命令範圍 | -134,217,728 to +134,217,727 (28bit) | |
| 減速度設定範圍 | 0 ~ 16,777,215 (24bit) | |
| 速度設定寄存器 | 三種類型:FL、FH 和 FA(校正速度) | |
| 速度設定範圍 | 1 ~ 100,000 (17bit) | |
| 加減速特性 | 加減速可獨立設定,分為直線加減速和S曲線加減速兩種。 | |
| 加速度設定範圍 | 1 ~ 65,535 (16bit) | |
| 減速度設定範圍 | 1 ~ 65,535 (16bit) | |
| 減速點自動設置 | 可在(減速時間)<(加速時間×2)範圍內自動設定 | |
| 速度校正功能 (避免過衝) |
在加速中開始減速的小移動量和過役的定位運行中,運行速度自動降低以避免過衝。 | |
| 計數器 | COUNTER1:命令位置計數器(28bit) COUNTER2:編碼器位置計數器(28bit) COUNTER3:偏差計數器(16bit) |
|
| 比較器 | 28bit×3Ch. | |
| 脈衝輸出頻率 | 最大6.6Mpps、最小0.1pps (G9103C輸出的脈衝控制訊號在內部連接到驅動器介面) |
|
| 連續運動暫存器 | 1段(可以自動連續寫入) | |
| 編碼器輸入 | 編碼器A、B、Z相輸入 (馬達驅動器訊號在內部連接到 G9103C 的 EA、EB 和 EZ 腳位) |
|
| 機械訊號輸入 | 限位、減速、原點、同時啟動/停止、閂鎖、緊急停止、2 個通用輸入 ・G9103C內部連接到驅動器 ・介面:光耦合器輸入 |
|
| 機械訊號輸出 | 比較器、報警器、定位完成、2個通用輸出 ・驅動器內部連接到G9103C ・介面:光耦合器輸出 |
|
| 内部控制 | 馬達勵磁ON,報警復位 ・由 G9103C 通用輸入/輸出控制 |
|
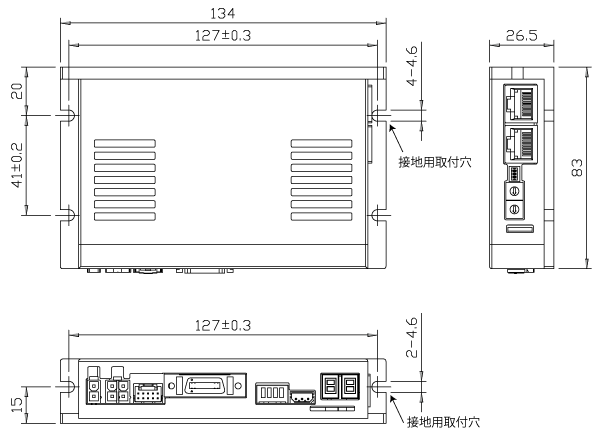
*點擊放大。
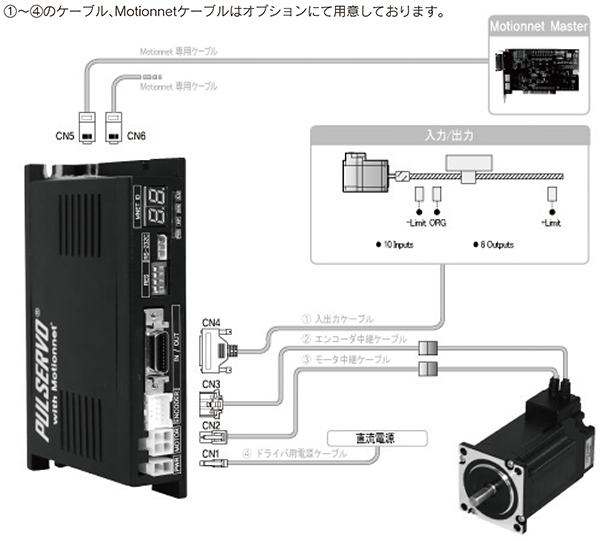
*點擊放大。
| 腳位 | 功能 | 輸入輸出 |
|---|---|---|
| 1 | +Limit | 輸入 |
| 2 | -Limit | 輸入 |
| 3 | Slow Down | 輸入 |
| 4 | Origin | 輸入 |
| 5 | Simul Start | 輸入 |
| 6 | Simul Stop | 輸入 |
| 7 | In 1 | 輸入 |
| 8 | In 2 | 輸入 |
| 9 | Latch | 輸入 |
| 10 | EMG. Stop | 輸入 |
| 11 | Out 1 | 輸出 |
| 12 | Out 2 | 輸出 |
| 13 | Compare | 輸出 |
| 14 | Alarm | 輸出 |
| 15 | In-position | 輸出 |
| 16 | Brake+※ | 輸出 |
| 17 | Brake-※ | – |
| 18 | NC | – |
| 19 | 24GND(EXT) | 輸入 |
| 20 | 24V(EXT) | 輸入 |
*煞車選配