


位置控制模式下的位置移動方式
這次,我們將介紹“位置控制模式下的位置移動方法” 。
簡單地說,位置控制模式(Profile 位置模式)
是輸入目標位置(607Ah:目標位置),通過操作控製字(6040h:控製字)使機器人移動到該位置的模式。通常表示點對點行為。
運動方法有以下三種:
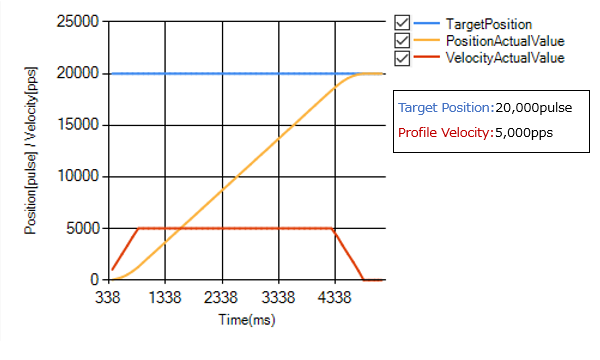
1. 一般移動方式
這是設定目標位置並向該目標位置執行移動的移動方法。
在目標位置(607Ah)中設置目標位置,並在控製字(6040h)的相對(Bit 6)中設置坐標模式(絕對位置/相對位置)。
當到達目標位置時,Status Word (6041h) 的 Target Reached (Bit 10) 變為 1。
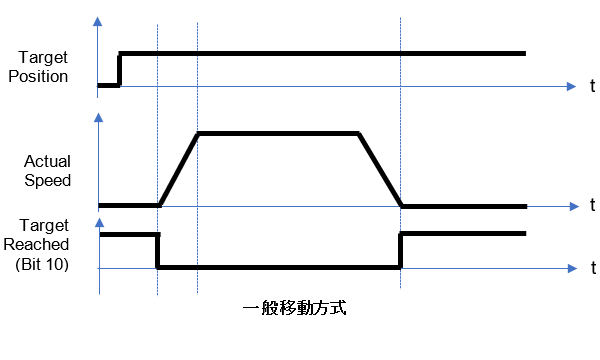
下圖是使用實際 EC-AD 演示機 (EC-AD1242A1) 重現此運動方法的圖表。
2. 下一個動作繼續移動方法(有緩衝的動作)
這是一種在移動到目標位置的同時發出移動到下一個目標位置的命令,在移動完成後無任何延遲地執行到下一個目標位置的移動方法。
一旦設置了連續位置移動數據,將不再接受位置移動數據。
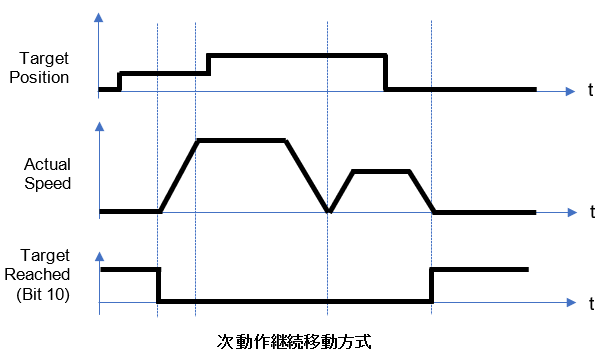
下圖是使用實際 EC-AD 演示機 (EC-AD1242A1) 重現此運動方法的圖表。
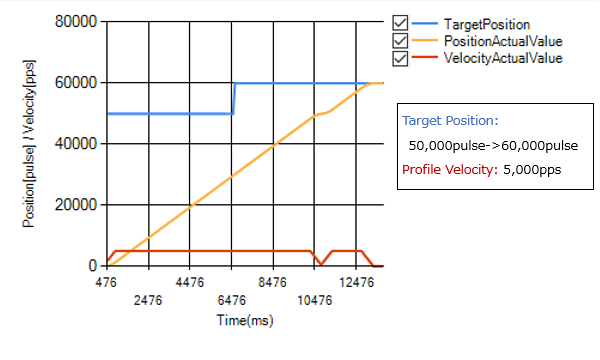
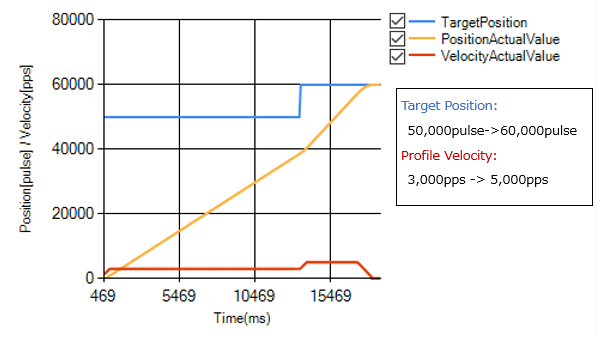
3.目標位置修正移動方法(超馳、無緩衝操作)
這是一邊向初始設定的目標位置移動一邊變更目標位置,通過操作控製字(6040h)來執行向變更後的目標位置的移動的移動方法。
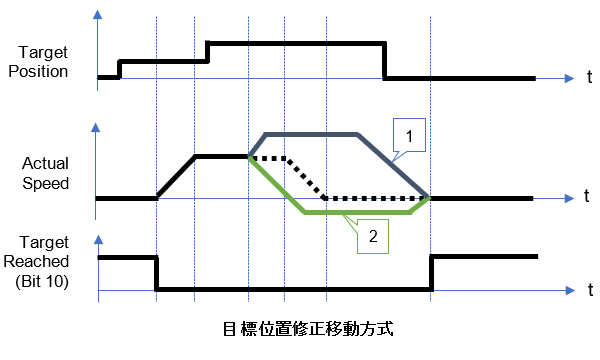
[1] 如果經過舊目標位置後存在新目標位置,則機器人將移動到新目標位置,而不在舊目標位置停留。
[2] 如果新的目標位置是已經經過的位置,則向相反方向移動。切換到相反方向就是“減速→停止→反方向加速”的操作。
下圖是使用實際 EC-AD 演示機 (EC-AD1242A1) 重現此運動方法的圖表。移動方法如上面“1”所述。
雖然上面的例子使用了絕對位置運動,但是相對位置和絕對位置運動的組合、S曲線/線性加/減速度等也可以通過操作控製字來設定。
詳情請參閱相關產品的使用說明書。
EC-AD系列
配備步進電機驅動器的EC-AD系列配備了我們成熟的脈衝控制LSI PCL系列。
該產品推薦用於不需要插補或CSP控制的EtherCAT多軸控制應用,因為PP模式可以使用直流同步和短週期時間(250us)。